
Inhaltsverzeichnis
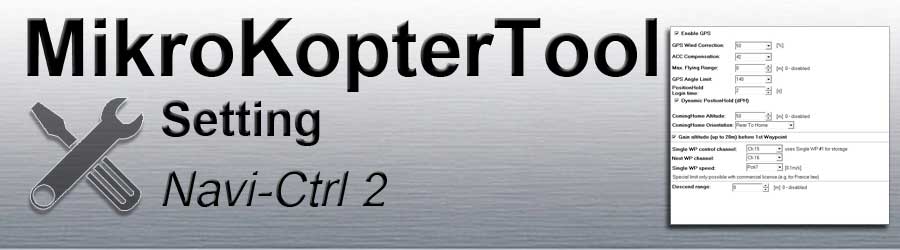
Enable GPS

The "GPS" function can be activated / deactivated here.
(See also EasySetup)
GPS Wind Correction
- Cross winds can cause the actual flight direction to deviate.
Here a lead angle tries to minimize this deviation.
The parameter controls the strength of this compensation.
A value of 0 means that this function is switched off.
ACC Compensation
Here it is determined how hard the MikroKopter brakes in position hold mode when the nick / roll sticks are centered again.
The higher this value, the more the MK brakes according to manual controls before it holds the target position.
Max. Flying Range
This value defines a circular area around the starting position in meters.
If you fly manually without GPS and exceed the distance set here, you will receive a
corresponding error message via telemetry (only Graupner HoTT or Jeti).
If you fly in dPH-GPS mode, this limit cannot be exceeded. The copter stops at the set flight radius.
A value of 0 (default) means that this function is switched off and you can fly as far as the radio range of the remote control allows.
Waypoint flight:
The flight radius for a waypoint flight depends on the license on your copter.
Without a license you have a WP flight radius of maximum 250m around the starting point.
With a license you have a WP flight radius of 1000m (or more) around the starting point.
Waypoints can only be set and approached for the possible flight radius.
If this function is deactivated (0), waypoints can be flown to within the maximum possible license radius.
GPS Angle Limit
Limits the maximum control influences of the GPS. A value of 100 roughly corresponds to a maximum inclination of 20 °.
If the value is too small, the MK may not come up against the wind and drift.
If the value is too large, the approach to the target will take place too quickly.
PositionHold Login time
This is the maximum time after which the MikroKopter logs in the new position after the sticks for Nick / Roll are in neutral position again.
Dynamic PositionHold (dPH)
- This function can be activated or deactivated here.
Enabled => If Dynamic PositionHold is enabled and the 3-was Switch for GPS is centered, the copter is also flying under GPS when you move the Nick/Roll sticks.
Here the copter is controlled by moving the GPS coordinates to a new position when
the nick / roll stick is moved. This enables a more precise positioning even in wind.
The Kopter flies to the positions a little bit slower.
Disabled => If Dynamic PositionHold is disabled, and the 3-was Switch for GPS is centered, the copter is flying manual when you move the Nick/Roll sticks.
The copter (the motors) is controlled directly by moving the nick / roll stick.
The function PH is deactivated as soon as the sticks are moved.
If both sticks are centered again, the PH function is automatically reactivated.
>
(See also EasySetup)
ComingHome
ComingHome Altitude
The height set here (in meters) applies to flying back when the ComingHome function is activated.
After activating the ComingHome function, the MikroKopter automatically flies back to the starting point.
(a GPS satellite fix must be available!).
During the return flight he takes the altitude set here and 'parks' when he reaches the 'HomePosition' at this height.
During the return flight, the set altitude is approached at 3m / sec - this cannot be changed!The following applies:
0: OFF -> the current height of the copter is retained on the return flight.
1-247: Value in meters -> this height is approached immediately when ComingHome (CH) is activated at 3m / sec.
IMPORTANT
The altitude:
- is only flown to with the AltitudeHold function switched on (in Vario altitude control mode).
- and the throttle stick must be centered.
ComingHome Orientation
The orientation of the copter on the ComingHome return flight can be set here:
- no change
- Front to home point
- Rear to home point
- Alignment like at the start
Gain altitude ...
If this function is activated, the Kopter rises straight up to 20m on the spot when starting the WP flight.
Only then will it fly directly to the height / position of the first waypoint.
Single WP
Single WP Control Channel
A free channel that is assigned a 3-way switch on the remote control can be entered here.
During a flight, a single waypoint can be saved or loaded directly via the remote control.
The function:
3-way Switch - position center => No function
3-way Switch - position OFF => "STORE"
- the current position, height, orientation of the copter is saved in a separate single waypoint in the copter.
3-way Switch - position ON => "LOAD"
- the saved waypoint is loaded
The automatic departure of the waypoint takes place as with normal waypoint flight => Ab "Schritt 2"
INFO:
The waypoints saved in this way are overwritten when you switch to "STORE" again
Next WP Channel
A free channel that is assigned a push button on the remote control can be entered here.
Depending on the position of the 3-way switch under "Single WP Control Channel" , further waypoints can be saved / loaded (max. 99 WP).
The function:
3-way Switch - position center + push the button once => No function
3-way Switch - position OFF => "STORE" => the first waypoint is saved
+ push the button => the second waypoint is saved
+ push the button => the third waypoint is saved
- ...
3-way Switch - position OFF ON => "LOAD" => the first waypoint is loaded
+ push the button => the second waypoint is loaded
+ push the button => the third waypoint is loaded
- ...
Single WP Geschw.
Hier kann entweder eine feste Zahl (x 0,1m/s) oder ein "Poti" eingetragen werden.
Die hier eingestellte Geschwindigkeit gilt für einen Wegpunkteflug, bei dem die Wegpunkte über den Sender (HoTT oder Jeti) per Telemetrie gespeichert wurden (siehe "Single WP Control Channel" / "Nächster WP Channel").
Alternativ zur festen Geschwindigkeit (per Zahl) kann über ein Potentiometer am Sender die Geschwindigkeit manuell gewählt werden.
Fail Sink-Radius
Hier kann ein maximaler "Sicherheits" Flugradius in Meter eingetragen werden.
Wird dieser Radius überschritten, geht der Kopter an Ort und Stelle automatisch in die Landung über.
(nur mit kommerzieller Lizenz möglich)
Dieser Radius ist z.B. in Frankreich bei kommerzieller Nutzung gefordert.
Tip:
Der Max. Flugradius sollte kleiner gewählt werden als der Fail Sink-Radius.
So hält der Kopter dann bei dem eingestellten max. Flugradius an.
Sollte der Kopter dann dennoch den zweiten Fail Sink-Radius erreichen (z.B. durch starke Windböen etc.), landet der Kopter dann automatisch an Ort und Stelle.