
Inhaltsverzeichnis
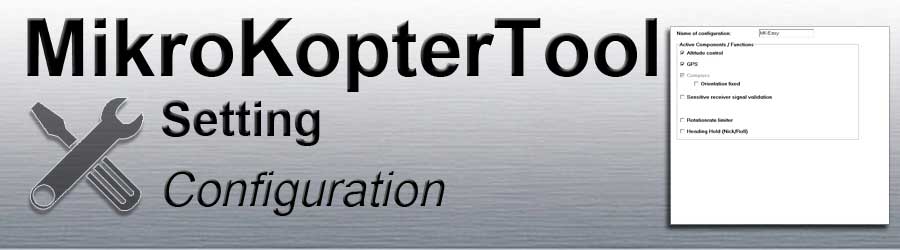
Name of configuration

The MikroKopter has five (5) memory locations (Setting) that can be set differently.
An individual name can be assigned to each of these five memory locations under Name of configuration.
(see also EasySetup)
Active Components / Functions
Altitude control
The function of the altitude controller can be activated / deactivated here.
When the function is activated, the MikroKopter automatically holds the altitude as soon as the throttle stick is centered.
(see also EasySetup)
GPS
The function of the GPS can be activated / deactivated here.
If the function is activated, the copter can be flown under GPS and additional functions can be used.
(see also EasySetup)
Compass
This field is automatically grayed out and active when GPS is selected.
Only if no GPS is installed and if you use an external compass with your FlightCtrl you can activate this field. Then you can e.g. use the function CareFree without GPS.
Orientation fixed
If this function is activated, the MikroKopter automatically aligns itself in the direction in which the copter was when it started.
ATTENTION: If this function is activated, the copter cannot be turned completely!
Sensitive receiver signal validation
This was built in specifically for the 35/40 MHz systems. Here the receipt is checked separately.
If you use a 2.4GHz transmitter / receiver you do not need this function.
Rotationrate limiter
Additional limitation of the rotation rate. This prevents quick maneuvers, since there is more countermeasure from a certain turning rate.
(Only for Nick and Roll)
Heading Hold (Nick/Roll)
If the sticks for nick / roll are centered, the MikroKopter normally aligns itself horizontally during the flight.
If the Heading Hold mode is activated, the MikroKopter will not align itself automatically after a flight maneuver.
With this setting e.g. most types of loops possible.
This function is not suitable for beginners! You need a lot of flying experience!
-> Attention: If you want to fly Heading Hold, you have to increase the I-part of the main controller (e.g. 30)!
IMPORTANT: 'GPS must be deactivated in order to use this function !