
Inhaltsverzeichnis
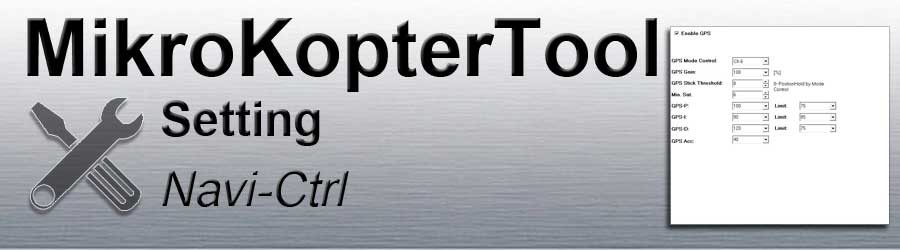
Enable GPS

The "GPS" function can be activated / deactivated here.
(See also EasySetup)
GPS Mode Control
A channel (e.g. CH6) can be entered under GPS mode control.
If this channel is then assigned to a 3-way switch on the remote control, the functions can be switched via this.
These are:- Switch OFF (0)
=> Free
=> Manual flight
=> GPS / compass support disabled
- Switch center (127)
=> PH
=> Function PositionHold activ
=> Stick Nick/Roll center = the copter maintains its current position
- Switch ON (254)
=> CH
=> Funktion ComingHome activ
=> The copter flies back to the starting point at ~3m/s
PH or CH can also be entered under GPS Mode Control to permanently activate the respective function.
(See also EasySetup)
GPS Gain
- Specifies how strong the GPS should work. If it is too large, the position swings strongly.
GPS Stick Threshold
This allows you to set the threshold for the PositionHold function in order to log a new position.
If you set the value to 0, it does not log out with the stick, but only by flipping the mode switch:
You fly to the desired position and switch to PH. Then you can play with the stick and the MK still wants to go to the target position. Especially in windy conditions, you can prevent the MK from drifting.
Min. Sat
Minimum number of satellites that must be received by the GPS for the GPS functions (GPS fix) to be activated.
") The MK requires at least 6 satellites for a 3D fix with reliable position values.
The MK requires at least 6 satellites for a 3D fix with reliable position values.
The more satellites are received, the greater the GPS accuracy.
GPS-P
P component of the control. Influence of the GPS distance on the controller (larger = stronger inclination in case of position deviation)
The effect has to be imagined as a virtual rubber rope that is attached to the MikroKopter on the one hand and to the target position on the other.
It always pulls the MK towards the target position and the stronger the MK is from the target. The parameter P determines the thickness of the rubber.
If it is small, the rubber rope is only weak - if it is large, the rubber rope is stronger. If the rubber cord is too strong, the regulator tends to vibrate.
Limit
Limits the effectiveness of the GPS-P parameter.
This parameter limits the tensile force of the virtual rubber rope between MK and target position. Since the pulling force increases proportionally with increasing distance to the target, this would become too great from a certain distance. The rubber rope is only an analogy for better understanding.
In reality, the MK's attitude causes the attraction to the target. If this attitude becomes too big, the MK will inevitably sag. To prevent this, there is a limitation of the P effect.
GPS-I
I component of the control. Eliminates the permanent positional deviation in wind (larger = greater inclination with longer positional deviation).
With regard to the rubber cord, this parameter acts like a memory. The longer the position deviation lasts, the more the rubber rope pulls towards the target.
Limit
Limits the effectiveness of the GPS-I parameter.
This sets the duration of the "memory" of the rubber cord.
GPS-D
D component of the control. Influence of the GPS speed on the controller (Larger = slower movement).
Influence of the speed of the MK on the control. (larger = more braking with every movement). The effect can be imagined as virtual friction, since the MK tries to counteract its own movement. This is important because without this friction the MK on the virtual rubber rope of the P component would only swing back and forth.
The larger the parameter D, the more the MK brakes every movement. If the parameter is too large, the MK twitches back and forth, because then the measurement noise of the speed affects the control.
Limit
Limits the effectiveness of the GPS-D parameter.
Similar to the GPS-P limit, this parameter limits the strength of the virtual friction.
GPS Acc
Support of the position by the ACC sensors. If you push the MK away, it reacts faster.
The effect of the parameter is analogous to that of the GPS-D. Only the reaction is much faster.
Speed
 If you want to change the speed at which e.g. the waypoints or! ComingHome is flown / flown to, this can be done by changing the values of GPS-P and GPS-D.
If you want to change the speed at which e.g. the waypoints or! ComingHome is flown / flown to, this can be done by changing the values of GPS-P and GPS-D.
The following applies:
Increase speed = increase GPS-P + decrease GPS-D.
Reduce speed = decrease GPS-P + increase GPS-D.
Example:
The settings for GPS-P and GPS-D are set to 90.
The speed here is ~6m/s with which the waypoints or ComingHome are flown to.
If you change the values for GPS-P to 100 and GPS-D to 60, this speed changes to ~8-9m/s.
Conversion from m/s in km/h => m/s * 3,6 = km/h (6m/s * 3,6 = 21,6km/h)
Caution: The values should be changed in small steps. The values should not be chosen too large / small. Here, the copter could also descend.
You can check the speed during the flight e.g. in the telemetry display or in the KopterTool under OSD (if a wireless connection is active between copter and computer).
INFO:
The max. Speed for ComingHome can be set.
=> Settings.ini => COMINGHOME_SPEED (default = 80 => 8m/s)