
Inhaltsverzeichnis
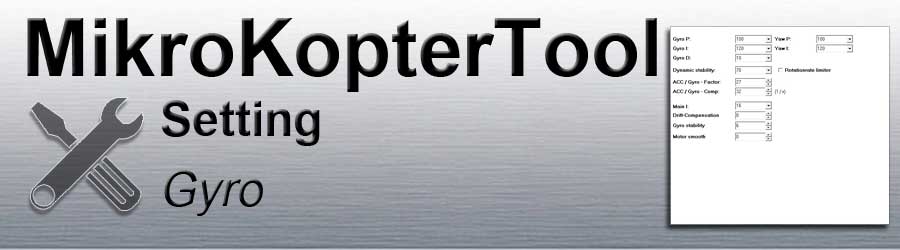
Gyro P

Influence of the gyro on the pitch and roll speed.
The higher the value, the slower the MikroKopter moves.
Gyro I
Position stabilization of the copter.
The higher the value, the stronger the relationship between stick angle and position angle.
Leads to large values ??(compared to gyro-P) to oscillate. If high, hard control '(high angles stabilization)' can be set up under vibration inclination, if low, soft control, tilt swing, wind-sensitive.
Gyro D
Controls the angular velocity upon returning from attitude changes (from tilted to level).
Is the value to high, the MikroKopter starts to vibrate / grumble.
Too low, and the MikroKopter will shake when flying fast, or when in wind.
Setting: a little bit below the value before the MikroKopter begins to vibrate (reduce by 20%)).
Yaw P
Yaw rate ratio to stick deflection.
The higher the value, the faster the rotation
The lower the value, the slower the rotation
Yaw I
- Yaw rate ratio to stick deflectio.
Dynamic stability
With this value now you can adjust how much the thrust regulates the axis control at this point.
Some pilots have been disrupted because of the strong increases of the MK. That was the reason for the rise in the wind and other phenomena such as, for example, bearing damage. Beginners also have problems with jumping on landing, which also has this cause.Smaller 64 -> the thrust is limited to less throttle -> no rise in or with strong control
Greater 64 -> the thrust can be greater than gas -> hard control of the axis -> rises with strong controls.
Rotationrate limiter
- After activating this function the electronic brakes faster axis motions of something.
ACC/Gyro-Faktor
Relationship between ACC sensor value and Gyro-integral.
If the MK is tilted a few degrees, the line of the ACC and the Gyro-integral have to be congruent.
(This value should normally NOT be changed!)
ACC/Gyro-Comp
Degree of fusion between ACC and Gyro (reciprocal).
The smaller the value, the faster the gyroangle adapted to the ACC sensor.
For hovering, high values are advantageous (> 100). For high-speed and aerobatics, you should use smaller values (10-50).
Main I
Summery of the angular errors. Provides greater precision between stick and location.
Should be increased when flying with Heading Hold. Can overshoot if the values are too large.
Drift-Compensation
!!! ONLY for FlightCtrl V1.x - NOT for FlightCtrl >2.0, 2.1, 2.5, 3.0 !!!
Specifies how many eighth (1/8) digits per 500 ms of drift must be tracked.
If the value is to small -> Gyrodrift (e.g. during temperature changes) pulls the MK strongly in one direction.
Value to high -> MK does not float so much on one spot.
Zero -> Drift compensation off, standard is 32, so rather conservative.
 Note: At the FC 2.x ME the value is always 0!
Note: At the FC 2.x ME the value is always 0!
Gyro stability
With this parameter you can change the "hardship regulation" of the position controller.
Generally low hardness: the MK does not react as strongly to disturbances (e.g. variations due to wind)
High hardship regulation: der MK reagiert sehr stark auf Störungen. The MK is way more 'crispy' in the air.
However, there can be variations in the ascent - particularly with heavy propellers (APC etc).Gyro stability = 6 (Standard) => light reduced hardship regulation
Gyro stability = 8 => normal hardship regulation
Gyro stability = kleiner 8 => reduced hardship regulation
Gyro stability = größer 8 => higher hardship regulation
 From software version V0.82 for the flight control you can set this value 1 to 16.
From software version V0.82 for the flight control you can set this value 1 to 16.
Motor smooth
(Is not required for standard MikroKopter - Should reduce swing Koptern at coax)
With the "Motor smooth" the control values for the BL controller are filtered again at the end of the control routine.
0 = original filter
1 = unfiltered
2 - x = filtered values
If the values get too big, it could theoretically swing a little.