
Inhaltsverzeichnis
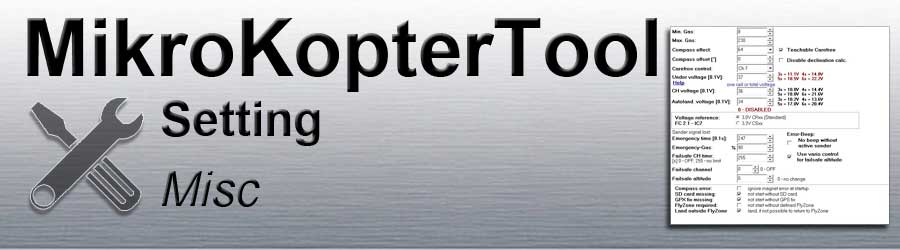
Misc 1

Min. Gas
Minimum throttle value that goes to the engines.
(normally does not need to be changed)
Max. Gas
Maximum throttle value that goes to the engines.
(normally does not need to be changed)
Compass effect
If a compass is connected, the influence on greed can be adjusted.
A small number has a small influence, a large number a large one.
(normally does not need to be changed)
Teachable Carefree
The CareFree function can be expanded with this function. Depending on the distance between the copter and the starting point, the function can then also be used as a safety function.
(See also Teachable Carefree)
Compass offset
!!! This value should NOT be changed if the compass is correctly installed !!!
With this the offset of the compass value can be set. This value is added to the measured compass value.
If the compass is e.g. installed counter-clockwise, the correction value must be positive.
=> Real compass = Measurement + Offset - Inclination
Disable declination calc
- If the "Compass offset" is adjusted manually (Default = 0), the automatic calculation of the declination can also be deactivated here.
Carefree control
A channel can be entered under CareFree control.
If this channel is then assigned to a 2-way switch on the remote control, you can use this to switch the function ON / OFF.
(See also Carefree Steuerung)
AkkuSafe


If the battery capacity reaches a certain limit, the function AkkuSafe takes effect.
A safety mechanism runs automatically in max. three levels.
The voltage limits for these three levels can be set here.
Step 1 => Undervoltage warning
Step 2 => CH voltage
Step 3 => Autoland voltage
Setting
The voltages at which the respective warning threshold should apply can be entered as follows:per cell
HHere you enter the individual cell voltage => e.g. 34 for 3,4V (per cell)
The total voltage is then automatically calculated based on the inserted battery (4S, 6S ...).
or
as a total tension
Here you enter the total voltage => e.g. 206 for 20,6V
Deactivate
- If you want to deactivate one of the warning thresholds, enter a "0" as value
IMPORTANT
Dhe voltages MUST be in descending order of voltages => 1.Undervoltage warning -> 2.CH-voltage -> 3.Autoland voltage
Undervoltage
When the first warning level is reached, the MK emits a continuous, quickly repeating peep tone.
At the same time, the message "!! LiPo voltage !! ”and a warning message is issued via the telemetry ~-(only Graupner Hott or Jeti).
CH voltage
If the battery capacity drops below the second warning level, the "ComingHome" function is automatically switched over and the Kopter flies back to the starting point.
INFO:
If a height was entered under ComingHome Höhe eand the copter is higher, it drops to this set height during the return flight.
If the copter is lower than the set ComingHome altitude, it maintains the current altitude and flies back to the HomePosition.
Autoland voltage
If the battery capacity reaches the third warning level, the copter automatically lands at a preset rate of descent.
Now you can turn off the engines manually ...
or you wait a short time after which the engines turn themselves off.
-~
Voltage reference

This setting affects ONLY a few FlightCtrl V2.1
ONLY if you have a FlightCtrl V2.1 with a "CSxx - 3,3V" (IC7), the value should be changed here to3,3V.
All others are not allowed to make any changes here. Otherwise, a change will lead to an early battery warning.
Emergency-Gas

The Emergency-Gas is part of the safety function in the event of a loss of reception.
It applies in the event of a loss of reception, if:no FailSafe is set
or the FailSafe time is running out.
Info: The entire EMERGENCY gas control only becomes active if a gas value of >40 has been exceeded for at least 4 seconds, i.e. the copter probably flies!
Emergency time
The "Emergency time" determines the duration of the Emergency-Gas function.
A maximum of "247" = 24.7 seconds can be entered here.
!!! After this time, the motors switch off automatically !!!
Emergency-Gas
!!! Applies only to the "Emergency-Gas" function, not to the "FailSafe" function. With the "FailSafe" function, the sink rate is determined automatically !!!
The value under "Emergency-Gas" is used to set the speed at which the copter should sink.
Here you can:- enter a fixed value of 0 - 247
- This value depends on the weight of the copter and must be determined in tests !!!
- or you use the "automatic"
For the automatic mode, the entry Use vario control for failsafealtitude is activated
=> If you activate this entry, a percentage sign (%) appears in front of the "Emergency-Gas" entry
Now a percentage of the required floating gas can be entered under "Emergency-Gas"100(%) means "hold altitude" 0> the copter will hoover and not come down
99(%) and lower => the copter sinks
101(%) and more => the copter rises !!! (a value around 80-90 (%) is recommended)
- enter a fixed value of 0 - 247
FailSafe


Failsafe CH time
In the event of a loss of reception, the Kopter flies towards the HomePosition for the time set here.
Users without a license can set a time from 0 - 60 (seconds) here.
With a license, you can enter 0 - 247 (seconds) or deactivate the timeout with "255".
The function and settings of the FailSafe itself are described here: FailSafe
Failsafe channel
A channel can be entered for the FailSafe channel. This can be used in two ways:
- Simulate loss of reception
The entered channel is assigned to a 2-way switch on the remote control.
If you switch this switch on, a reception failure is simulated and the! FailSafe function starts.
So you can test the function during a flight and switch it off again immediately if necessary.
- Receiver without loss of reception
If a receiver is used that does not signal a loss of reception, the MK cannot detect a loss of reception.
In the event of a loss of reception, the copter would then continue to fly with the settings last received.
A free channel of the receiver can now be entered here. This channel must be set on the receiver via the remote control so that it is switched off in the event of a reception failure.
- Simulate loss of reception
Failsafe altitude
A height can be entered here (1-247(m)) at which the Kopter flies back in the event of a loss of reception.
This height should prevent you from flying into obstacles (such as trees, houses, ...).
Diverses 2

Compass error
ATTENTION: This function should NOT normally be activated!
If the compass is faulty, the copter will not be started for safety reasons.
(e.g. due to defective, strong distraction from metal or power source, attempt to start on metallic floor, ...)
If you activate this function,an magnetic error will be ignored and you can start/fly the copter with this fault !
This may be necessary for test purposes. Or if you have e.g. to start from a ship (if the error is usually gone after taking off).
If this function is active and there is a magnetic error, flying with a GPS function is expressly NOT recommended. (PositionHold, ComingHome, CareFree).
Magnetic errors can affect flight and cause the compass to malfunction.
This can lead to the copter crashing.
SD card missing
If SD card missing is activated, the Kopter only starts with an inserted SD card.
This can be useful if you want to make sure that the LOG file (e.g. for photo recordings) is saved.
INFO: The engines can still be started under certain conditions.
But it is then not possible to increase the engine speed.
GPX fix missing
If you activate GPX fix missing, the motors can only be started with a satellite fix.
Without a Satfix, GPS functions such as PositionHold, ComingHome or FailSafe are not possible.
To ensure that the GPS functions can be used, this function should be activated.INFO: The engines can still be started under certain conditions.
But it is then not possible to increase the engine speed.
FlyZone required
Sollte man aufgrund Behördlicher Auflagen nur in einem bestimmten Bereich fliegen dürfen,
If you are only allowed to fly in a certain area due to official requirements, FlyZone required can be activated here.
The permitted flight zone can then be set via the flight waypoints and saved in the copter.
The copter can then only be launched and flown within this flight zone.
Land outside FlyZone
If you fly in a planned flight zone, the copter can also leave this zone unintentionally (e.g. strong wind).
Here it can be officially required that the copter then automatically land in such a case.
In such a case, the landing is initiated by activating this function.