
Inhaltsverzeichnis
Diverses 1

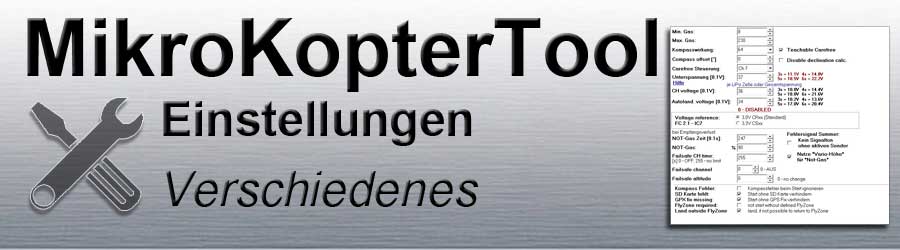
Min. Gas
- Minimaler Gaswert, der an die Motoren geht.
Max. Gas
- Maximaler Gaswert, der an die Motoren geht.
Kompasswirkung
Ist ein Kompass angeschlossen, kann hiermit der Einfluss auf Gier eingestellt werden.
Hierbei hat eine kleine Zahl eine geringen, eine große Zahl eine großen Einfluss.
Teachable Carefree
Mit dieser Funktion kann das CareFree erweitert werden. Abhängig von der Entfernung zwischen Kopter und Startpunkt, kann die Funktion dann auch als Sicherheitsfunktion genutzt werden.
(Siehe auch Teachable Carefree)
Compass offset
!!! Dieser Wert sollte bei korrekt eingebautem Kompass NICHT verändert werden !!!
Hiermit kann der Offset des Kompass-Wertes eingestellt werden. Dieser Wert wird auf den gemessenen Kompasswert addiert.
Wenn der Kompass z.B. gegen den Urzeigersinn verdreht eingebaut ist, muss der Korrekturwert positiv sein.
=> Echter Kompass = Messung + Offset - Inclination
Disable declination calc
- Wird der "Compass offset" manuell verstellt (Default = 0), kann hier zusätzlich die automatische Berechnung der declination deaktiviert werden.
Carefree Steuerung
Unter CareFree Steuerung kann ein Kanal eingetragen werden.
Ist dieser Kanal dann einem 2-fach Schalter an der Fernsteuerung zugeteilt, kann man hierüber die Funktion AN / AUS schalten.
(Siehe auch Carefree Steuerung)
AkkuSafe


Erreicht die Akkukapazität eine bestimmte Grenze greift die Funktion AkkuSafe.
Hierbei läuft automatisch ein Sicherheitsmechanismuss in max. drei Stufen ab.
Die Spannungsgrenzen für diese drei Stufen können hier eingestellt werden.
Stufe 1 => Unterspannung
Stufe 2 => CH voltage
Stufe 3 => Autoland voltage
Einstellung
Die Spannungen, bei der die jeweilige Warnschwelle greifen soll, können wie folgt eingegeben werden:pro Zelle (zweistellig)
Hierbei gibt man die einzelne Zellspannung ein => z.B. 34 für 3,4V (pro Zelle)
Die Gesamtspannung wird dann automatisch nach dem angesteckten Akku (4S, 6S ...) errechnet.
als Gesamtspannung (dreistellig)
Hierbei gibt man die Gesamtspannung ein => z.B. 206 für 20,6V
Deaktivieren
- möchte man eine der Warnschwellen deaktivieren, gibt man als Wert eine "0" ein
WICHTIG
Die Spannungen MÜSSEN in der Voltzahl absteigend sein => 1.Unterspannung -> 2.CH-voltage -> 3.Autoland voltage
Unterspannung
Wird die erste Warnstufe erreicht, gibt der MK einen sich schnell wiederholenden Peep-Ton von sich.
Gleichzeitig wird über die Telemetrie die Meldung „!! LiPo voltage !!“ sowie eine Warnmeldung ausgegeben ~-(nur Graupner Hott oder Jeti).
CH voltage
Unterschreitet die Akkukapazität eine zweite Warnstufe, wird automatisch auf die Funktion „ComingHome“ umgeschaltet und der Kopter fliegt zurück zum Startpunkt.
INFO:
Wurde unter ComingHome Höhe eine Höhe eingetragen und der Kopter ist höher, sinkt er während des Rückfluges auf diese eingestellte Höhe.
Ist der Kopter niedriger als die eingestellte ComingHome Höhe behält er die aktuelle Höhe bei und fliegt in dieser zurück zur HomePosition.
Autoland voltage
Erreicht die Akkukapazität dann die dritte Warnstufe, landet der Kopter automatisch mit einer voreingestellten Sinkgeschwindigkeit.
Nun kann man die Motoren manuell abstellen ...
oder man wartet eine kleine Zeitspanne ab nach der sich die Motoren selber abstellen.
-~
Voltage reference

Diese Einstellung betrifft NUR einige wenige FlightCtrl V2.1
NUR wenn man eine FlightCtrl V2.1 mit einem "CSxx - 3,3V" (IC7) hat, sollte der Wert hier umgestellt werden.
Alle anderen dürfen hier keine Änderung vornehmen. Eine Änderung führt sonst zu einer verfrühten Akkuwarnung.
NOT-Gas

Das NOT-Gas gehört zur Sicherheitsfunktion bei einem Empfangsverlust.
Es greift bei einem Empfangsausfall wenn:kein FailSafe eingestellt wurde
oder die FailSafe Zeit abgelaufen ist.
Info: Die gesamte NOT-Gas-Regelung wird erst aktiv, wenn ein Gas-Wert von >40 für mindestens 4 Sekunden überschritten war, d.h. der Kopter wahrscheinlich fliegt!
NOT-Gas Zeit
Die "NOT-Gas Zeit" bestimmt die Laufzeit der NOT-Gas Funktion.
Hier kann maximal "247" = 24,7 Sekunden eingetragen werden.
!!! Nach dieser Zeit schalten sich die Motoren automatisch ab !!!
NOT-Gas
!!! Gilt nur für die "Notgas"-Funktion, nicht für die Funktion "FailSafe". Hier wird die Sinkgeschwindigkeit automatisch bestimmt !!!
Mit dem Wert unter "NOT-Gas" wird eingestellt, mit welcher Geschwindigkeit der Kopter sinken soll.
Hier kann man entweder:- einen festen Wert von 0 - 247 eintragen
- Dieser Wert ist abhängig vom Gewicht des Kopters und muss in Versuchen ermittelt werden !!!
- oder man nutzt die "Automatik"
Für die Automatik wird der Eintrag Nutze "Vario-Höhe" für "Not-Gas aktiviert
=> Aktiviert man diesen Eintrag, erscheint vor dem Eintrag "NOT-Gas" ein Prozentzeichen (%)
Jetzt kann unter "NOT-Gas" ein Prozentwert vom benötigten Schwebegas eingetragen werden- 100(%) bedeuten Höhe halten
99(%) und kleiner => der Kopter sinkt
101(%) und größer => der Kopter steigt !!! (ein Wert um 80-90(%) ist zu empfehlen)
- einen festen Wert von 0 - 247 eintragen
FailSafe


Failsafe CH time
Bei einem Empfangsausfall fliegt der Kopter für die hier eingestellte Zeit in Richtung HomePosition.
Nutzer ohne Lizenz können hier eine Zeit von 0 - 60 (Sekunden) einstellen.
Mit Lizenz ist eine Eingabe von 0 - 247 (Sekunden) oder ein deaktivieren der Zeitsperre mit "255" möglich.
Die Funktion und die Einstellungen des FailSafe selber sind hier beschrieben: FailSafe
Failsafe channel
Beim FailSafe-Channel wird ein Kanal eingetragen. Dieser kann auf zweierlei Arten genutzt werden:
- Empfangsausfall simulieren
Der eingetragene Kanal ist hierbei einem 2-fach Schalter an der Fernsteuerung zugeteilt.
Schaltet man diesen Schalter ein, wird ein Empfangsausfall simuliert und die FailSafe Funktion startet.
So kann man während eines Fluges die Funktion testen und bei Bedarf sofort wieder ausschalten.
- Empfänger ohne Empfangsverlust
Wird ein Empfänger genutzt, der keinen Empfangsausfall signalisiert, kann ein Empfangsverlust nicht erkannt werden und der Kopter fliegt mit den zuletzt empfangenen Einstellungen weiter.
Hier kann nun ein freier Kanal des Empfängers eingetragen werden. Dieser Kanal muss dann über das "fail safe" des Empfängers so eingestellt werden, dass bei einem Empfangsausfall dieser Kanal ausgeschaltet ist.
- Empfangsausfall simulieren
Failsafe altitude
Hier wird die Höhe eingetragen, in der der Kopter im Falle eines Empfangsausfalles zurückfliegt.
Diese Höhe dient dazu, um nicht während des automatischen Rückfluges in Hindernisse wie z.B. Bäume, Häuser, etc. hinein zufliegen.
Diverses 2

Kompass Fehler
ACHTUNG: Diese Funktion sollte nur für Testzwecke genutzt werden!
Ist der Kompass fehlerhaft wird ein Starten des Kopters verhindert um ein Fehlverhalten auszuschließen.
(z.B. durch defekt, starke Ablenkung durch Metall oder Stromquelle, Startversuch auf metallischem Boden ...)
Wird Kompassfehler beim Start ignoriere aktiviert, werden Magnet-Fehlermeldungen ignoriert und der
Kopter kann so zu Testzwecken gestartet und geflogen werden.
Bei Nutzung dieser Funktion ist ein fliegen mit GPS-Funktion (PositionHold, ComingHome, CareFree) ausdrücklich nicht empfohlen.
Vorhandene Magnetfehler können den Flug beeinträchtigen und eine Fehlfunktion des Kompass verursachen.
Dies kann bis zum Absturz des Kopters führen.
SD Karte fehlt
Wird Start ohne SD Karte verhindern aktiviert, startet der Kopter nur mit eingelegter SD-Karte.
Die kann nützlich sein, wenn man sichergehen möchte, dass z.B. das LOG-File für Fotoaufnahmen gespeichert wird.
INFO: Unter bestimmten Voraussetzungen können Die Motoren dennoch gestartet werden.
Ein Abheben / steigern der Motordrehzahl ist dann aber nicht möglich.
GPX fix missing
Aktiviert man Start ohne GPS Fix verhindern, können die Motoren nur mit erfolgten Sat-Fix gestartet werden.
Ohne Satfix sind GPS-Funktionen wie PositionHold, ComingHome oder das FailSafe nicht möglich.
Um sicherzustellen, dass die GPS-Funktionen genutzt werden können, kann diese Funktion aktiviert werden.INFO: Unter bestimmten Voraussetzungen können Die Motoren dennoch gestartet werden.
Ein Abheben / steigern der Motordrehzahl ist dann aber nicht möglich.
FlyZone required
Sollte man aufgrund Behördlicher Auflagen nur in einem bestimmten Bereich fliegen dürfen,
kann hier not start without defined FlyZone aktiviert werden.
Die erlaubte Flugzone kann dann über den Wegpunkteflug gesetzt und in den Kopter gespeichert werden.
Der Kopter ist dann nur innerhalb dieser Flugzone start- und fliegbar.
Land outside FlyZone
Fliegt man in einer geplanten Flugzone kann der Kopter diese Zone auch ungewollt verlassen (z.B. starker Wind).
Hier kann es Behördlich gefordert sein, dass in solch einem Fall der Kopter dann automatisch landet.
Mit einer Aktivierung von land, if not possible to return to FlyZone wird in solch einem Fall die Landung eingeleitet.