
Inhaltsverzeichnis
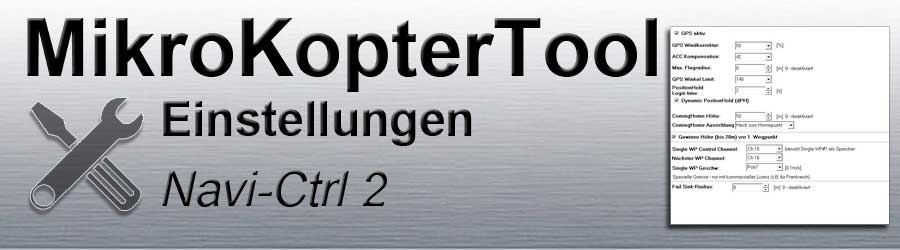
GPS aktiv

Hier kann die GPS-Funktion aktiviert / deaktiviert werden.
Bei aktivierter Funktion kann der Kopter unter GPS geflogen und zusätzliche Funktionen genutzt werden.
(Siehe auch EasySetup)
GPS Windkorrektur
- Durch Seitenwind kann es zu einer Abweichung der realen Flugrichtung (aktueller Kurs) von der Sollflugrichtung (Peilung auf das Ziel) kommen.
Hier wird durch einen Vorhaltewinkel versucht diese Abweichung zu minimieren.
Der Parameter kontrolliert die Stärke dieser Kompensation.
Ein Wert von 0 bedeutet, dass diese Funktion abgeschaltet ist.
ACC Kompensation
Hier wird festgelegt, wie stark der MikroKopter im PositionHold-Mode abbremst, bevor die Position gelockt wird,
wenn man die Sticks manuell bewegt hatte.
Je höher dieser Wert, desto stärker bremst der MK nach manuellen Steuerungen ab, bevor er die Soll-Position festhält.
Max. Flugradius
Dieser Wert definiert ein kreisförmiges Gebiet um die Startposition in Meter.
Fliegt man manuell ohne GPS und überschreitet die hier eingestellte Entfernung, bekommt man eine
entsprechende Fehlermeldung über die Telemetrie angezeigt/angesagt (nur HoTT oder Jeti).
Fliegt man in dPH-GPS-Mode, kann diese Grenze nicht überschritten werden. Der Kopter stoppt am eingestellten Flugradius.
Ein Wert von 0 (default) bedeutet, dass diese Funktion abgeschaltet ist und man so weit fliegen kann, wie es die Funkreichweite der Fernsteuerung erlaubt.
Wegpunkteflug:
Der Flugradius bei einem Wegpunkteflug ist abhängig von der erworbenen Lizenz.
Ohne Lizenz hat man einen WP-Flugradius von max. 250m um den Startpunkt herum.
Mit Lizenz hat man einen WP-Flugradius von 1000m (oder mehr) um den Startpunkt herum.
Wird hier ein Flugradius gesetzt, können nur Wegpunkte innerhalb dieses Radius gesetzt und angeflogen werden.
Ist diese Funktion deaktiviert (0), können Wegpunkte innerhalb des Lizenzradius angeflogen werden.
GPS Winkel Limit
Begrenzt die maximalen Steuereinflüsse des GPS. Ein Wert von 100 entspricht in etwa einer maximalen Schräglage von 20°.
Ist der Wert zu klein, kann es sein, dass der MK nicht gegen den Wind ankommt und abdriftet.
Ist der Wert zu groß, wird der Anflug auf das Ziel ggf. zu schnell erfolgen.
PositionHold Login time
Das ist die maximale Zeit, nach der der MikroKopter die neue Position einloggt, nachdem die Sticks für Nick/Roll wieder in Neutralstellung sind.
Dynamic PositionHold (dPH)
- Diese Funktion kann hier aktiviert oder deaktiviert werden.
Aktiviert => Ist Dynamic PositionHold aktiviert, fliegt man den Kopter beim bewegen der Nick/Roll-Sticks auch unter GPS.
Der Kopter wird beim Bewegen des Nick- / Rollstick durch verschieben der GPS Koordinaten
auf eine neuen Position gesteuert. Dadurch ist eine genauere Positionierung auch bei Wind möglich.
Hierbei fliegt er die Positionen etwas langsamer an; bewegt sich also etwas träger.
Deaktiviert => Ist Dynamic PositionHold deaktiviert, fliegt man den Kopter beim bewegen der Nick/Roll-Sticks manuell.
Der Kopter wird hierbei durch Bewegen des Nick- / Rollstick direkt gesteuert.
Die Funktion PH wird sobald die Sticks bewegt werden, deaktiviert.
Werden beide Sticks wieder zentriert, wird die Funktion PH automatisch wieder aktiviert.
(Siehe auch EasySetup)
ComingHome
ComingHome Hohe
Die hier eingestellte Höhe (in Meter) gilt für das Zurückfliegen bei aktivierter Funktion ComingHome.
Nach aktivieren der Funktion ComingHome fliegt der MikroKopter automatisch zum Startpunkt zurück.
(ein GPS Sat-Fix muss dabei vorhanden sein!).
Während des Rückfluges nimmt er die hier eingestellte Höhe ein und 'parkt' bei erreichen der 'HomePosition' ebenfalls in dieser Höhe.
Während des Rückfluges wird die eingestellte Höhe mit 3m/sek angeflogen - das kann man nicht verändern!Hierbei gilt:
0: Aus -> die aktuelle Höhe des Kopters wird beibehalten.
1-247: Wert in Metern -> diese Höhe wird sofort bei aktivieren von ComingHome (CH) mit 3m/sek angeflogen.
WICHTIG
Die Höhe wird (wie beim Wegpunkteflug auch):
- nur mit eingeschalteter Funktion HöheHalten im Vario-Höhenregler Modus angeflogen.
- und der Gas-Stick muss dabei in Neutrallage (Mittelstellung) sein.
ComingHome Ausrichtung
Hier kann die Ausrichtung des Kopter beim ComingHome-Rückflug eingestellt werden:
- keine Änderung
- Front zum Homepunkt
- Heck zum Homepunkt
- (Ausrichtung) wie beim Start
Gewinne Höhe
Ist diese Funktion aktiviert, steigt der Kopter beim Starten des WP-Fluges an Ort und Stelle bis auf 20m gerade hoch.
Dann erst fliegt er auf direktem Weg zur Höhe/Position des ersten Wegpunkt.
Single WP
Single WP Control Channel
Hier kann ein freier Kanal, der mit einem 3-fach Schalter an der Fernsteuerung belegt ist, eingetragen werden.
Während eines Fluges kann hierüber ein einzelner Wegpunkte direkt über die Fernsteuerung gespeichert oder geladen werden.
Die Funktion:
3-fach Schalter Mittelstellung => Keine Funktion
3-fach Schalter Schaltstellung AUS => "STORE"
- die aktuelle Position, Höhe, Ausrichtung des Kopters wird in einem Wegpunkt im Kopter gespeicher.
3-fach Schalter Schaltstellung AN => "LOAD"
- der gespeicherte Wegpunkt wird geladen
Das automatische Ab-/Anfliegen des Wegpunktes erfolgt wie beim normalen Wegpunkteflug auch => Ab "Schritt 2"
INFO:
Wird der 3-fach Schalter aus der Position "STORE" in die Mittelposition bewegt, bleiben die so gespeicherten Wegpunkt(e) erhalten und können über die 3-fach Schalterstellung "LOAD" abgeflogen werden.
Wird der 3-fach Schalter nun erneut in die Position "STORE" geschaltet, wird der erste gepeicherte Wegpunkt mit dem aktuellen überschrieben. Bei Betätigung des Tasters "Nächster WP Channel" wird dann der zweite, dritte ... WP mit dem jeweils aktuellen überschrieben.
Nächster WP Channel
Hier kann ein freier Kanal, der mit einem Taster an der Fernsteuerung belegt ist, eingetragen werden.
Je nach Stellung des 3-fach Schalters unter "Single WP Control Channel", können hier weitere Wegpunkte gespeichert/geladen werden (max. 99 WP).
Die Funktion:
3-fach Schalter Mittelstellung + Taster wird betätigt => Keine Funktion
3-fach Schalter Schaltstellung AUS => "STORE"
+ Taster wird betätigt => ein zweiter Wegpunkt wird gespeichert
+ Taster wird betätigt => ein dritter Wegpunkt wird gespeichert
- ...
3-fach Schalter Schaltstellung AN => "LOAD"
+ Taster wird betätigt => der zweite Wegpunkt wird geladen
+ Taster wird betätigt => ein dritte Wegpunkt wird geladen
- ...
Single WP Geschw.
Hier kann entweder eine feste Zahl (x 0,1m/s) oder ein "Poti" eingetragen werden.
Die hier eingestellte Geschwindigkeit gilt für einen Wegpunkteflug, bei dem die Wegpunkte über den Sender (HoTT oder Jeti) per Telemetrie gespeichert wurden (siehe "Single WP Control Channel" / "Nächster WP Channel").
Alternativ zur festen Geschwindigkeit (per Zahl) kann über ein Potentiometer am Sender die Geschwindigkeit manuell gewählt werden.
Fail Sink-Radius
Hier kann ein maximaler "Sicherheits" Flugradius in Meter eingetragen werden.
Wird dieser Radius überschritten, geht der Kopter an Ort und Stelle automatisch in die Landung über.
(nur mit kommerzieller Lizenz möglich)
Dieser Radius ist z.B. in Frankreich bei kommerzieller Nutzung gefordert.
Tip:
Der Max. Flugradius sollte kleiner gewählt werden als der Fail Sink-Radius.
So hält der Kopter dann bei dem eingestellten max. Flugradius an.
Sollte der Kopter dann dennoch den zweiten Fail Sink-Radius erreichen (z.B. durch starke Windböen etc.), landet der Kopter dann automatisch an Ort und Stelle.